

BFT机器人公众号
关注有惊喜
获取最新动态


在BFT机器人一站式采购平台,客户可以采购原厂全新的机器人产品,品质、售后均有保障,还可以获得平台积分或礼品回赠
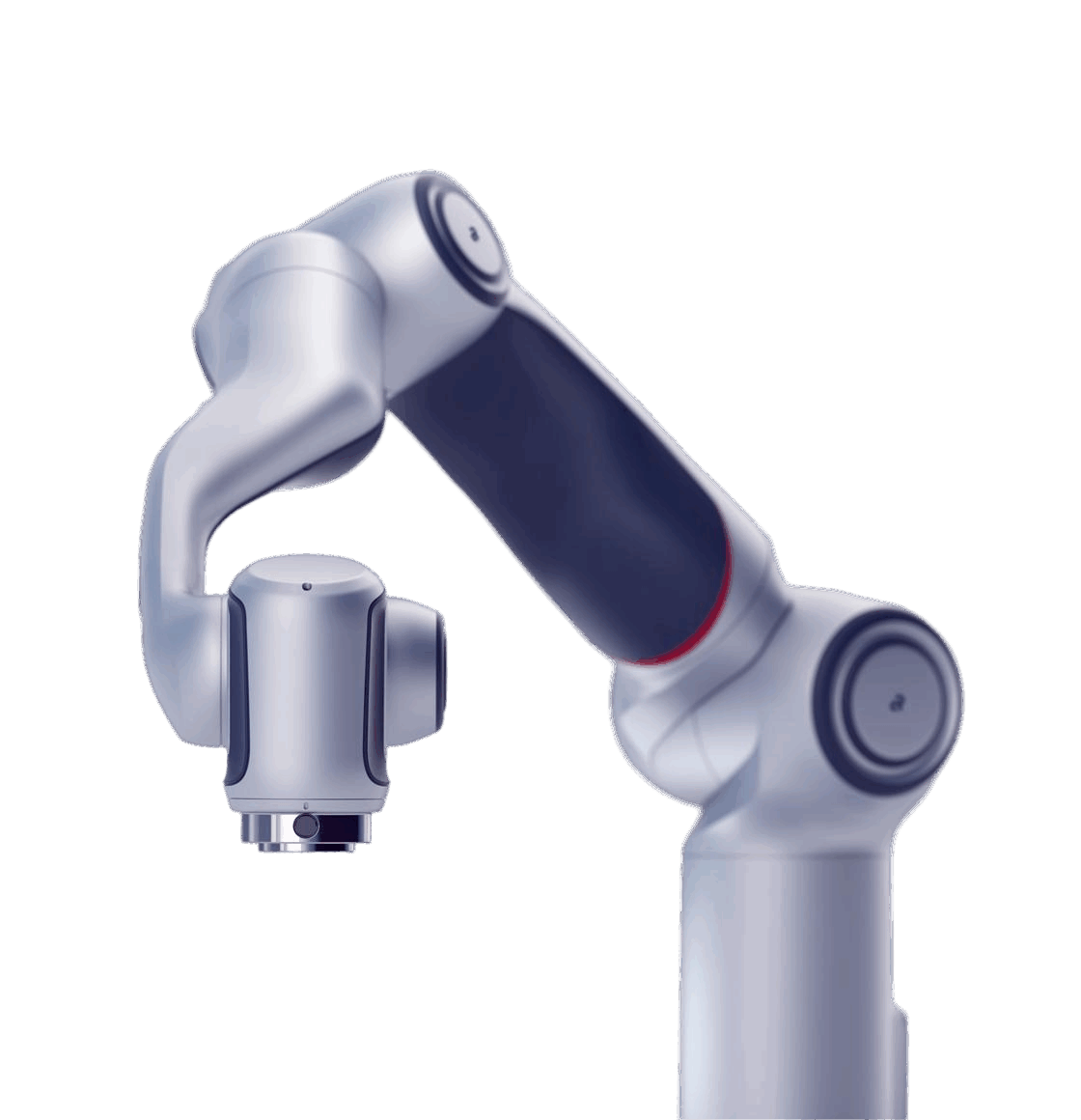
Kinova Gen3 Robots-6DoF协作机器人的有效载荷为2kg,最大覆盖面为891毫米,由于其嵌入式控制器、占地面积小、重量轻、功耗低,Kinova的Gen3是移动机器人应用的理想候选产品。









本研究以Kinova Gen3 7 自由度机械臂为核心载体,提出针对性解决方案:为机械臂适配腹腔镜与高分辨率相机,构建 “机械臂 - 腹腔镜 - 成像” 一体化采集系统;设计两种光照条件(模拟真实 MIS 的腹腔镜光源、用于基准对比的手术室 overhead 光源)与三种运动轨迹(模拟临床的 Trocar 轨迹、覆盖更全面的 Open-Close/Open-Far 球形轨迹),采集多视角离体器官图像;融合 “基于学习的特征匹配算法 + COLMAP

斯坦福大学《2025 AI Index Report》指出,2024年90 %以上的“里程碑级AI模型”由产业界发布,学术界虽仍贡献高被引研究,却普遍受限于“算法规模扩张与真实硬件验证之间的巨大落差”。实验室普遍缺“开箱即用”的科研级机械臂。

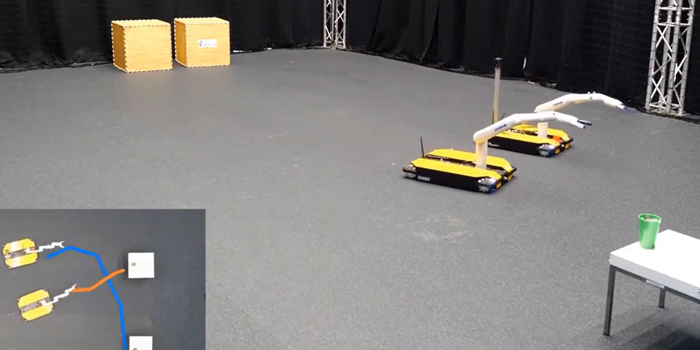
传统工业机器人受固定基座限制,服务机器人则操作精度不足,而 “移动操作机器人” 融合高精度机械臂与全向移动能力,通过 “操作 + 移动” 的协同,突破场景限制。

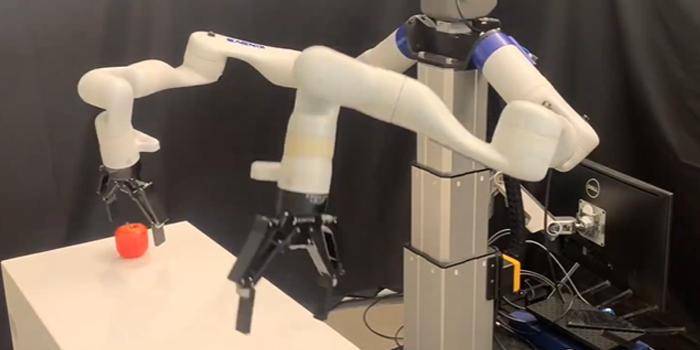
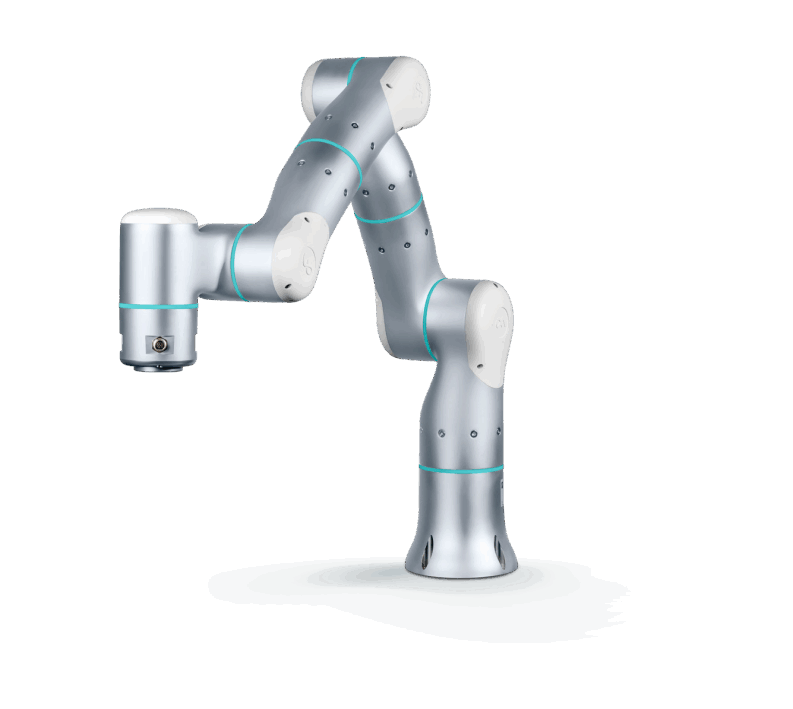
基于约束的任务规范和控制框架eTaSL通过共享自主方法实现了 Kinova Gen3 机器人手臂的辅助远程操作。我们使用反应控制来处理环境的不可预测性,例如避免动态障碍和与人类互动。
2009年,Kinova工程师为残障人士开发了初代JACO辅助机械臂。这款采用碳纤维材料的6-7自由度机械臂,开启了Kinova在医疗康复领域的传奇征程。2023年迭代的Gen3系列,通过七自由度拟人化关节设计以及内置扭矩传感,将医疗机器人技术推向新高度。在麦吉尔大学的腹腔镜手术测试中,减少了对患者的创伤,并提高了手术过程中的精度和可控性。





















































































评分
0.0