




































































Franka Research 3+Gello:低成本高精度遥操机械臂解决方案
方案概述
Franka Research 3 作为顶尖力感应机械臂平台,在精密操作与科研场景中备受青睐,而 Gello 遥操作小臂以 “低成本 + 运动学等效” 设计打破传统遥操技术瓶颈。二者的组合实现了 “高精度执行 + 直观化控制” 的协同效应,为机器人模仿学习、精密作业等领域提供了高效解决方案。
BFT平台有最新款FrankaResearch和Gello遥操作小臂,品质有保障,如需了解型号参数、报价或定制方案,欢迎随时前来咨询采购。
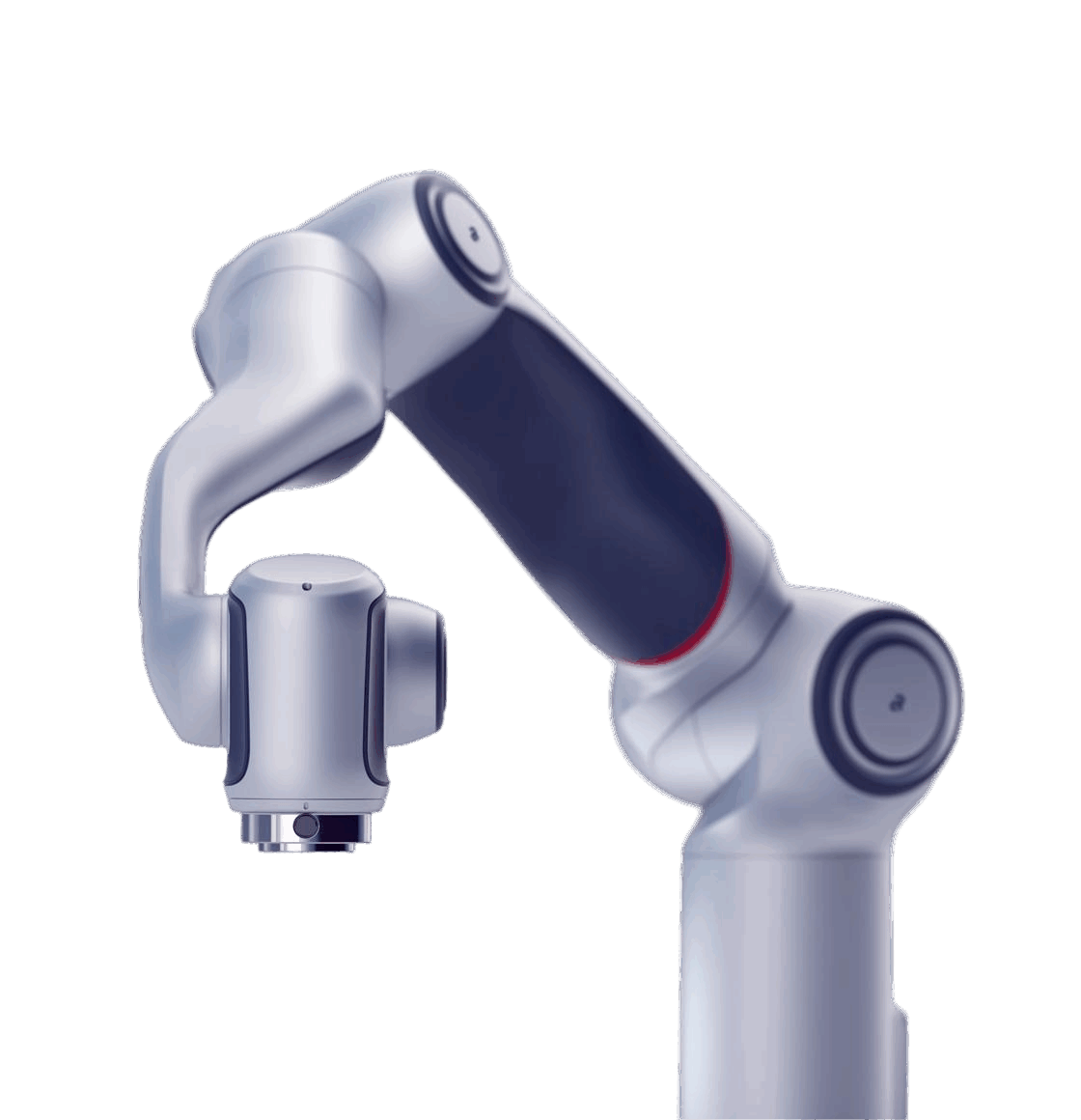
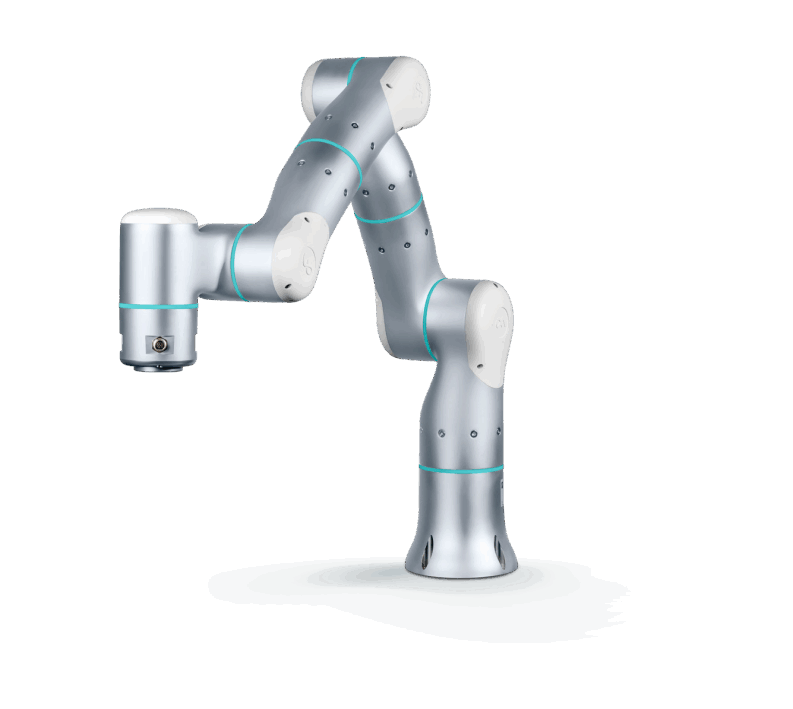
1.Franka Research3 机械臂
自由度7 轴,每个关节集成高精度扭矩传感器,姿态重复定位精度达 ±0.1mm;
有效载荷3kg,最大工作半径 855mm,工作空间覆盖率 94.5%;
支持1kHz 高频直接扭矩控制,兼容 ROS/ROS2机器人操作系统及MATLAB&Simulink 生态;
防护等级IP40,适应实验室及工业环境应用需求。

2.Gello 遥操作小臂
采用与目标机械臂(Franka Research 3)运动学结构一致的设计,按 0.5 比例缩放适配;
搭载DYNAMIXEL XL330 系列伺服电机,编码器分辨率 12 位,测量精度 0.088 机械度;
提供Python API开发接口,基于ZMQ协议实现通信控制;
硬件设计与软件代码完全开源,支持二次开发与定制化改造。

系统集成核心优势
操作直观性强:
通过运动学等效设计,操作员可以直接感知Franka Research3 的关节约束,无需复杂逆运动学计算,降低操作门槛。
成本与性能平衡:
总体拥有成本为传统高保真遥操作系统的1%,在保证操作精度的同时,大幅降低部署成本。实验数据表明,其任务成功率显著高于3D 鼠标、VR 控制器等替代方案,自碰撞故障率与操作超时率均实现数量级降低。
高精度协同控制:
依托Franka Research3 的亚毫米级精度与 Gello 的高分辨率传感能力,结合 1kHz 高频数据交互,实现主从设备间动作的毫秒级同步响应,确保复杂操作的精准复现。

应用场景
科研实验:为机器人模仿学习、深度强化学习等算法研究提供高质量演示数据,可直接部署于高校机器人实验室,支持控制算法验证、运动规划研究及教学实验平台建设。

智能制造:用于精密电子元件装配、柔性材料处理等高精度任务,支持快速部署柔性产线,通过标准化控制接口实现产线重构,提升复杂装配工序的执行效率与产品一致性。

医疗健康:在微创内镜手术辅助、康复设备调试等场景中优势显著,借助力反馈功能实现柔顺操作,降低对脆弱组织的损伤风险,提升医疗操作的安全性与可控性。

关于BFT白芙堂机器人
BFT(白芙堂)机器人是智能机器人一站式服务平台,能为客户提供机器人选型、培训、解决方案、在线采购、本地化定制等高性价比的一站式服务。平台产品涵盖协作机器人、工业机器人、移动机器人、SCARA机器人、服务机器人、机器人夹爪、三维机器视觉设备、3D工业相机等十余种品类,实现机器人产业链产品全覆盖,并广泛应用于工业制造、实验室自动化、智慧零售、教育科研等行业。平台已与国内外知名机器人企业达成战略合作,并拥有专业的工程师团队,能为客户提供算法及系统定制、职校教学、科研实验室平台搭建、机器人展厅定制等服务,支持一对一技术支持和二次开发。